Robot đeo được cho là thiết bị được sử dụng trong nhiều phương pháp điều trị phục hồi chức năng cho người già và bệnh nhân đang hồi phục sau đột quỵ hoặc chấn thương. Công nghệ cảm biến điện cơ (EMG) mới cho phép điều khiển ổn định lâu dài robot đeo được và không bị ảnh hưởng bởi mồ hôi và da chết của người đeo, đã thu hút được sự chú ý gần đây.
Một nhóm nghiên cứu chung do Giáo sư Jae-Woong Jung từ Trường Kỹ thuật Điện KAIST (EE) và Giáo sư Jung Kim từ Khoa Kỹ thuật Cơ khí KAIST (ME) dẫn đầu phát triển thành công cảm biến microneedle co giãn và kết dính, có thể cảm nhận các tín hiệu sinh lý bằng điện ở mức độ cao mà không bị ảnh hưởng bởi tình trạng làn da của người dùng. Kết quả của nghiên cứu này được viết bởi đồng tác giả đầu tiên là Heesoo Kim và Juhyun Lee, cả hai đều là Tiến sĩ Trường KAIST của EE, đã được xuất bản trên tạp chí Science Advances với tiêu đề “Miếng dán dính microneedle có thể co giãn, không cần chuẩn bị cho da để cảm biến điện sinh lý đáng tin cậy và điều khiển robot khung ngoài”.
Để robot đeo nhận ra ý định đằng sau chuyển động của con người để sử dụng trong điều trị phục hồi chức năng, chúng cần có cảm biến điện sinh lý có thể đeo để cung cấp các phép đo EMG chính xác. Tuy nhiên, các cảm biến hiện tại thường cho thấy chất lượng tín hiệu suy giảm theo thời gian và bị ảnh hưởng rất nhiều bởi tình trạng da của người dùng. Hơn nữa, độ cứng cơ học cao hơn của cảm biến gây ra tiếng ồn do bề mặt tiếp xúc không thể theo kịp sự biến dạng của da. Những thiếu sót này hạn chế khả năng kiểm soát lâu dài và đáng tin cậy của robot đeo được.
Tuy nhiên, công nghệ được phát triển gần đây dự kiến sẽ cho phép đo EMG lâu dài và chất lượng cao vì nó sử dụng chất nền dẫn điện có khả năng co giãn và kết dính được tích hợp với mảng vi kim dễ dàng xuyên qua lớp sừng mà không gây khó chịu. Thông qua hiệu suất tuyệt vời của nó, cảm biến được dự đoán là có thể điều khiển ổn định robot đeo trong thời gian dài, bất kể tình trạng da thay đổi của người đeo và không cần bước chuẩn bị để loại bỏ mồ hôi và tế bào chết trên bề mặt da.
Nhóm nghiên cứu tạo ra cảm biến kim siêu nhỏ có khả năng co giãn và kết dính bằng cách tích hợp nhiều kim siêu nhỏ vào chất nền polyme silicon mềm. Các vi kim cứng xuyên qua lớp sừng, nơi có điện trở cao. Cảm biến giúp giảm điện trở tiếp xúc với da một cách hiệu quả và thu được tín hiệu điện sinh lý chất lượng cao bất kể bị nhiễm bẩn. Đồng thời, chất nền dẫn điện mềm và bám dính có thể thích ứng với bề mặt da và co giãn theo chuyển động của người đeo, mang lại cảm giác vừa vặn thoải mái và giảm thiểu tiếng ồn do chuyển động gây ra.
Để xác minh khả năng sử dụng của miếng vá mới, nhóm nghiên cứu tiến hành thử nghiệm hỗ trợ chuyển động bằng cách sử dụng robot đeo được. Họ gắn miếng dán microneedle (vi kim) vào chân người dùng, nơi nó có thể cảm nhận được những tín hiệu điện do cơ tạo ra. Sau đó, cảm biến gửi ý định được phát hiện đến một robot có thể đeo, cho phép robot giúp người đeo nâng vật nặng dễ dàng hơn.
Giáo sư Jae-Woong Jung, người đứng đầu nghiên cứu, cho biết: “Cảm biến microneedle có khả năng co giãn và bám dính được phát triển có thể phát hiện tín hiệu EMG một cách ổn định mà không bị ảnh hưởng bởi trạng thái da của người dùng. Thông qua đó, chúng tôi sẽ có thể điều khiển robot có thể đeo được với hiệu suất cao hơn, độ chính xác và ổn định, điều này sẽ giúp phục hồi chức năng cho những bệnh nhân sử dụng robot”.
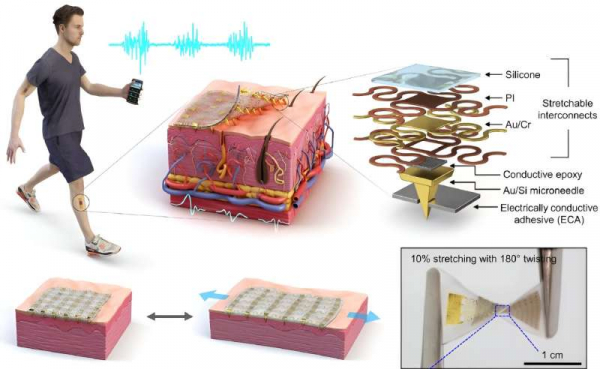
Khái niệm thiết kế và hoạt động của Miếng dán dính microNeedle (vi kim) có thể kéo dài (SNAP). (A) Sơ đồ minh họa cấu hình hệ thống tổng thể và ứng dụng SNAP. (B) Sơ đồ dạng xem mở rộng của SNAP, bao gồm các liên kết ngoằn ngoèo có thể kéo dài, microneedle Si được phủ Au và ECA làm bằng hỗn hợp silicon vảy Ag. (C) Hình ảnh quang học cho thấy khả năng tuân thủ cơ học cao của SNAP.
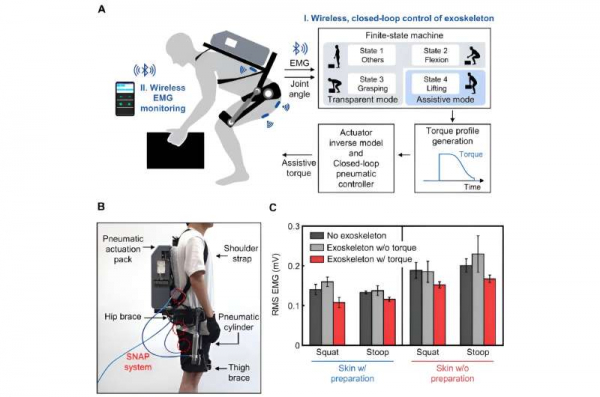
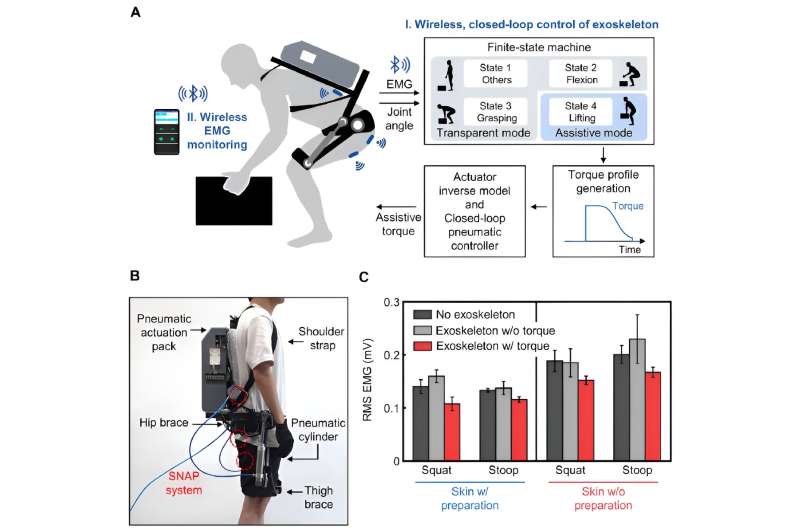
Trình diễn hệ thống Miếng dán dính vi kim co giãn không dây (SNAP) dưới dạng giao diện Người-máy (HMI) để điều khiển vòng kín của robot khung ngoài. (A) Hình minh họa mô tả kiến trúc hệ thống và chiến lược điều khiển của robot khung ngoài. (B) Cấu hình phần cứng của hệ thống khung ngoài hỗ trợ lưng bằng khí nén. (C) So sánh bình phương trung bình gốc (RMS) của điện cơ (EMG) có và không có sự hỗ trợ của robot trên da được điều trị trước và da không được điều trị trước.

 Da điện tử - thiết bị đeo tương lai
Da điện tử - thiết bị đeo tương lai  Thiết bị đeo biến cái chạm của ngón tay thành nguồn năng lượng
Thiết bị đeo biến cái chạm của ngón tay thành nguồn năng lượng