Mắt cá chân giả cải thiện chuyển động
Theo một nghiên cứu mới của Đại học bang North Carolina (NC) và Đại học Bắc Carolina (UNC) ở Đồi Chapel (Mỹ), mắt cá chân giả bằng robot được điều khiển bởi xung thần kinh cho phép người mất chi di chuyển “tự nhiên” hơn, cải thiện sự ổn định của họ.
Helen Huang, tác giả nghiên cứu và Giáo sư xuất sắc Khoa Kỹ thuật Y sinh chung tại UNC, cho biết: “Công trình này tập trung vào ‘kiểm soát tư thế’, vốn phức tạp một cách đáng ngạc nhiên. Về cơ bản, khi chúng ta đứng yên, cơ thể liên tục điều chỉnh để giữ cho chúng ta đứng vững. Ví dụ, nếu ai đó va vào khi chúng ta đang xếp hàng, chân sẽ thực hiện một loạt các chuyển động mà chúng ta thậm chí không thể thực hiện được để giữ cho chúng ta đứng thẳng. Chúng tôi làm việc với những người bị cắt cụt chi dưới và họ nói với chúng tôi rằng việc đạt được sự ổn định này với họ là một thách thức đáng kể. Và nghiên cứu này chứng minh mắt cá chân giả bằng robot được điều khiển bằng tín hiệu điện cơ (EMG) đặc biệt tốt trong việc cho phép người dùng đạt được sự ổn định tự nhiên này”.
Tín hiệu EMG là tín hiệu điện được ghi lại từ cơ của một cá nhân. Một bài báo về nghiên cứu, “Điều khiển bộ phận giả thần kinh khôi phục cơ chế thần kinh gần như bình thường trong kiểm soát tư thế đứng”, được công bố trên tạp chí Science Robotics. Bài báo được đồng tác giả bởi Wentao Liu, tiến sĩ khoa Liên hợp Kỹ thuật Y sinh. Ví dụ về người tham gia phản ứng trước một sự xáo trộn dự kiến khi họ bị đẩy lùi. Khi sử dụng thiết bị hàng ngày, cá nhân cần một bước để phản ứng với sự xáo trộn, tuy nhiên, khi sử dụng bộ phận giả được điều khiển bằng thần kinh, họ có thể duy trì tư thế tĩnh. Nghiên cứu mới được xây dựng dựa trên nghiên cứu trước đó, chứng minh rằng khả năng điều khiển thần kinh của mắt cá chân giả được hỗ trợ có thể khôi phục một loạt khả năng - bao gồm đứng trên các bề mặt đầy thử thách và ngồi xổm.
Trong nghiên cứu, nhóm nhà khoa học làm việc với 5 người bị cắt cụt một chân dưới đầu gối. Những người tham gia được gắn một mắt cá chân giả bằng robot nguyên mẫu có khả năng phản ứng với tín hiệu EMG được thu bởi mạng cảm biến trên chân. Aaron Fleming, đồng tác giả của nghiên cứu, giải thích: “Về cơ bản, mạng cảm biến được đặt trên các cơ tại vị trí cắt cụt chi. Khi một người tham gia nghiên cứu nghĩ đến việc di chuyển chi bị cắt cụt, điều này sẽ gửi tín hiệu điện qua phần cơ còn lại ở chi dưới. Mạng cảm biến thu tín hiệu qua da và chuyển những tín hiệu đó thành lệnh cho thiết bị giả”. Nhóm nhà nghiên cứu tiến hành đào tạo chung cho những người tham gia bằng cách sử dụng thiết bị nguyên mẫu để họ phần nào làm quen với công nghệ. Sau đó, những người tham gia nghiên cứu được giao nhiệm vụ ứng phó với một “sự xáo trộn dự kiến” - nghĩa là họ phải phản ứng với điều gì đó có thể khiến họ mất thăng bằng.

Trong cuộc sống hàng ngày, điều này có thể giống như việc bạn bắt một quả bóng hoặc nhặt đồ tạp hóa. Tuy nhiên, để tái tạo chính xác các điều kiện trong suốt quá trình nghiên cứu, nhóm nhà nghiên cứu phát triển một hệ thống cơ học được thiết kế để thách thức sự ổn định của những người tham gia. Những người tham gia nghiên cứu được yêu cầu phản ứng với sự xáo trộn dự kiến trong hai điều kiện: sử dụng các thiết bị giả mà họ thường sử dụng; và sử dụng nguyên mẫu robot giả. Fleming nói: “Chúng tôi nhận thấy rằng những người tham gia nghiên cứu ổn định hơn đáng kể khi sử dụng nguyên mẫu robot. Họ ít có khả năng vấp ngã hoặc ngã”.
Huang bình luận: “Đặc biệt, nguyên mẫu robot cho phép những người tham gia thay đổi chiến lược kiểm soát tư thế của họ. Đối với những người có chi dưới còn nguyên vẹn, sự ổn định tư thế bắt đầu từ mắt cá chân. Đối với những người bị mất chi dưới, họ thường phải bù đắp cho việc thiếu kiểm soát mắt cá chân. Chúng tôi nhận thấy việc sử dụng mắt cá chân robot phản ứng với tín hiệu EMG cho phép người dùng quay lại phản ứng bản năng của họ để duy trì sự ổn định”.
Trong một phần riêng biệt của nghiên cứu, nhóm nhà khoa học yêu cầu những người tham gia lắc lư qua lại trong khi sử dụng bộ phận giả thông thường của họ và trong khi sử dụng bộ phận giả robot nguyên mẫu. Những người tham gia được trang bị mạng cảm biến được thiết kế để đo hoạt động của cơ trên toàn bộ phần dưới cơ thể.
Huang nói: “Chúng tôi nhận thấy mô hình hoạt động của cơ ở phần dưới cơ thể rất khác nhau khi mọi người sử dụng hai bộ phận giả khác nhau. Về cơ bản, các kiểu kích hoạt cơ khi sử dụng nguyên mẫu chân tay giả rất giống với các kiểu mà chúng tôi thấy ở những người sử dụng hoàn toàn hai chi dưới còn nguyên vẹn. Điều đó cho chúng ta biết rằng nguyên mẫu mà chúng tôi phát triển bắt chước hành vi của cơ thể đủ chặt chẽ để cho phép mọi người bình thường. Các mô hình thần kinh sẽ quay trở lại. Điều này rất quan trọng vì nó gợi ý rằng công nghệ này sẽ phần nào mang tính trực quan đối với người dùng. Đây là một phát hiện có ý nghĩa lâm sàng vì sự ổn định về tư thế là một vấn đề quan trọng đối với những người sử dụng thiết bị giả. Chúng tôi hiện đang tiến hành một thử nghiệm lớn hơn với nhiều người hơn để chứng minh tác dụng của công nghệ và xác định cá nhân nào có thể được hưởng lợi nhiều nhất”.
 Pin linh hoạt hỗ trợ thị giác
Pin linh hoạt hỗ trợ thị giác 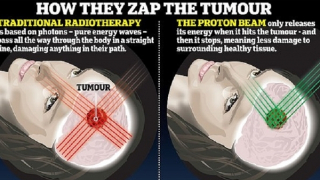 Liệu pháp chùm tia proton “cứu cánh” cho bệnh nhân ung thư?
Liệu pháp chùm tia proton “cứu cánh” cho bệnh nhân ung thư?